

| ZAPPING INDICE - PRINCIPAL - NOTICIAS |
|
|
ZAPPING 0072, 23-04-2002 Robotitos versus cucarachas Imaginen un enjambre de tanques a control remoto, del tamaño de cucarachas, tomando por asalto un edificio a través de las cañerías y respiraderos. Estos minúsculos tanques, armados con los adecuados sensores, cámaras y dispositivos de comunicación, podrían registrar lugares de difícil acceso en busca de armas químicas, minas o bombas plantadas. También podrían detectar sobrevivientes después de un accidente o rastrear movimientos de personas. Esta es otra visión de CF que podría volverse realidad muy pronto, gracias al trabajo de Ed Heller y sus colegas del Sandia National Laboratories de los Estados Unidos. El grupo presentó recientemente lo que sería el robot más pequeño del mundo, que puede girar sobre una moneda de diez centavos y estacionar en una de cinco, como dicen sus creadores. El nuevo mini-robot es el más nuevo de una serie creada en Sandia. Para hacerlo todavía más pequeño que sus predecesores, los científicos usaron una nueva técnica para encapsular los circuitos electrónicos, un diseño de ruedas distinto y materiales diferentes en el cuerpo.
Anteriormente, y en un lugar diferente, se dieron pasos importantes en otro sentido. Algunos investigadores en Tokio adquirieron notoriedad hace un tiempo al mostrar que se podían gobernar los movimientos de una cucaracha con implantes. Su idea era que, logrando esto, se podían usar "robocucarachas" en reconocimientos secretos o para buscar restos en catástrofes. Luego de eso, un ingeniero desarrolló la faceta opuesta de esa conexión: un vehículo robótico que es controlado por una cucaracha.
¿Para qué sirve un robot que intenta deslizarse dentro de una ranura cuando la luz de la cocina se enciende en medio de la noche? En realidad, Or diseñó este robot para ver si un sistema nervioso biológico podía servir como mecanismo de control. El problema de los especialistas en robótica —en particular en aquellos robots cuyas creaciones imitan artrópodos— es integrar y combinar toda la información necesaria para que las patas trabajen en forma coordinada. "El tema fundamental es conseguir que un robot muestre la agilidad y la velocidad que tiene un insecto", dice Fred Delcomyn, un biólogo de la Universidad de Illinois que trabaja en robots de seis patas. Es demasiado pronto para saber si el enfoque de Or es la respuesta a esto. Or piensa que el sistemas nervioso y sensorial de los animales puede ser una alternativa poco costosa para las sofisticadas computadoras de control que se necesitan para misiones espaciales. Planea ingresar a un programa de doctorado en los EEUU y refinar el robot controlado por una cucaracha. ¿Su siguiente paso? "Reducir el tamaño del robot hasta que sea similar al de su 'conductora' ". Imágenes: Randy Montoya / Laboratorio Nacional de Sandia y Museo Interactivo de Ciencias Naturales. |
|
 El robot resultante no mide más de 1,5 cm de lado y pesa menos de 30 g. Sus dos motores se alimentan con tres pilas de reloj y mueven ruedas-oruga similares a las de un tanque, ubicadas a los lados del vehículo. También incluye un procesador con 8 Kb de ROM y un sensor de temperatura. En las pruebas realizadas el mini robot —que se mueve a unos 50 centímetros por minuto— ha recorrido exitosamente pistas de obstáculos construidas con monedas de cambio chico. Y los científicos tienen diversos planes para mejorar sus capacidades. Ahora están considerando añadir una cámara en miniatura, micrófono, un dispositivo de comunicaciones y un micro-sensor químico.
El robot resultante no mide más de 1,5 cm de lado y pesa menos de 30 g. Sus dos motores se alimentan con tres pilas de reloj y mueven ruedas-oruga similares a las de un tanque, ubicadas a los lados del vehículo. También incluye un procesador con 8 Kb de ROM y un sensor de temperatura. En las pruebas realizadas el mini robot —que se mueve a unos 50 centímetros por minuto— ha recorrido exitosamente pistas de obstáculos construidas con monedas de cambio chico. Y los científicos tienen diversos planes para mejorar sus capacidades. Ahora están considerando añadir una cámara en miniatura, micrófono, un dispositivo de comunicaciones y un micro-sensor químico.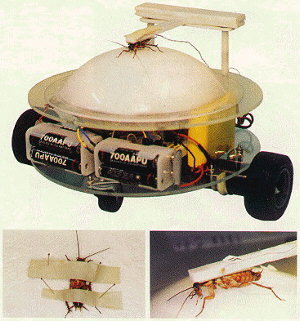 Hajime Or construyó lo que él llama un "robot biomecatrónico" cuando trabajaba en su título de especialización en la Universidad de Tokyo. Después de inmovilizar una cucaracha americana (Periplaneta americana), le insertó finos alambres de plata en los músculos extensores de las patas traseras. Luego se le permitió a la cucaracha tener la sensación de "correr" sobre una semiesfera lisa, que parece un trackball. Los alambres recogen las débiles señales eléctricas generadas por los músculos y estas señales son amplificadas y alimentadas a los motores de las ruedas. De esta forma, la máquina sigue la dirección y velocidad de la carrera de la cucaracha.
Hajime Or construyó lo que él llama un "robot biomecatrónico" cuando trabajaba en su título de especialización en la Universidad de Tokyo. Después de inmovilizar una cucaracha americana (Periplaneta americana), le insertó finos alambres de plata en los músculos extensores de las patas traseras. Luego se le permitió a la cucaracha tener la sensación de "correr" sobre una semiesfera lisa, que parece un trackball. Los alambres recogen las débiles señales eléctricas generadas por los músculos y estas señales son amplificadas y alimentadas a los motores de las ruedas. De esta forma, la máquina sigue la dirección y velocidad de la carrera de la cucaracha.