|
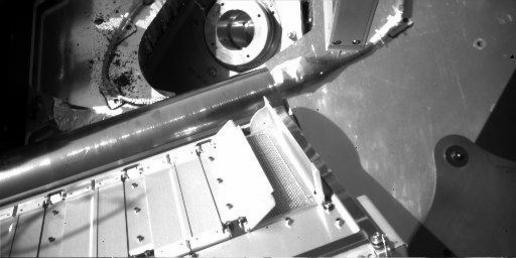
A Fénix se le atraganta el suelo de MarteVastitas Borealis, Sol 13; el brazo robótico del Phoenix se ha topado con un terreno difícil de manejar. Las apelmazadas arenas del ártico marciano se niegan a entrar en los instrumentos de análisis.Una semana de trabajo y aún no conocemos la identidad de la sustancia blanca que la nave Phoenix Mars Lander de la NASA desenterró en las heladas llanuras del ártico marciano. Todo comenzó en Sol 8, cuando Phoenix se preparaba para analizar su primera muestra de suelo marciano; las puertas de una de las cámaras del TEGA (Thermal and Evolved-Gas Analyzer) no terminaban de abrirse. TEGA es un analizador que calienta el material y analiza los gases desprendidos. Hay ocho cámaras de análisis como la que se muestra en la imagen.
Arriba: Puertas entreabiertas. En esta vista captada por la cámara del brazo robótico del Phoenix se pueden apreciar las puertas entreabiertas que dan acceso a uno de los pequeños hornos del TEGA. Se observa una rejilla metálica, bajo la cual se sitúa un embudo que conduce la muestra directamente hacia el horno. La abertura mide 10 centímetros de largo por 4 centímetros de ancho. Crédito: NASA / JPL-Caltech / Universidad de Arizona / Max Planck Institute. Aunque las puertas no se abrieron por completo, se consideró que sería suficiente para recibir la muestra. En Sol 11 se tomó una palada de tierra con el brazo robótico, del lugar designado como Baby Bear, Osito.
Arriba: Dodo y Baby Bear. Esta imagen captada por el Surface Stereo Imager (SSI) muestra las dos pequeñas zanjas excavadas por el brazo robótico del Phoenix. A la izquierda la zanja de prueba, denominada Dodo, a su derecha, la zanja creada al extraer la primera muestra para analizar, designada como Baby Bear. Crédito: NASA / JPL-Caltech / Universidad de Arizona / Texas A&M University.
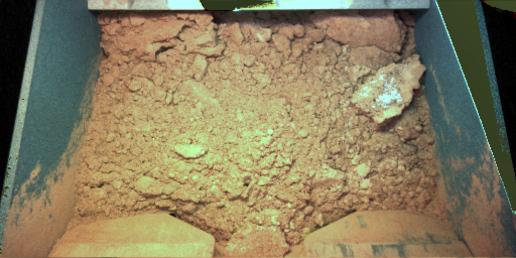
Arriba: Baby Bear en la pala. Esta vista captada por la cámara del brazo robótico del Phoenix muestra el material extraído de la zanja Baby Bear. De nuevo llama la atención ese material blanquecino en la parte derecha de la imagen. Crédito: NASA / JPL-Caltech / Universidad de Arizona / Max Planck Institute.
Arriba: Baby Bear sobre el objetivo. Esta imagen captada por el Surface Stereo Imager (SSI) muestra el material extraído por el brazo robótico del Phoenix de la zanja Baby Bear, justo antes de ser volcado sobre las puertas entreabiertas del TEGA. Crédito: NASA / JPL-Caltech / Universidad de Arizona / Texas A&M University. Un día después, en Sol 12, la pala del brazo robótico volcó su contenido sobre la rejilla de acceso al analizador TEGA. Sin embargo, los sensores del interior no fueron capaces de confirmar la entrada de material a través de la rejilla hacia el horno. Aparentemente, el terreno tiene una consistencia y una cohesividad mayores de lo esperado, y no es capaz de pasar a través de la rejilla, diseñada a modo de tamiz para evitar que una cantidad excesiva de muestra pueda bloquear el analizador.
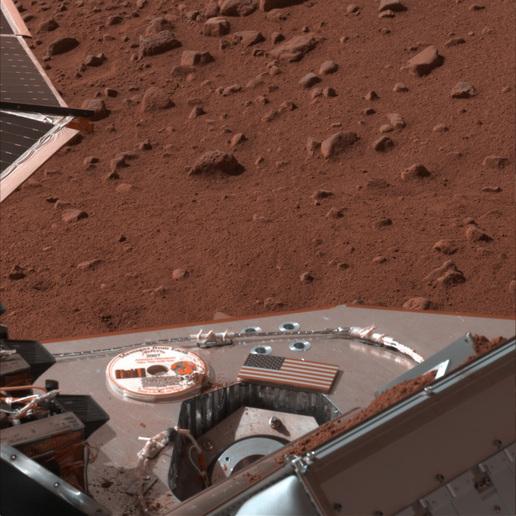
Arriba: Volcado de la muestra. Esta imagen captada por el Surface Stereo Imager (SSI) muestra la zona del analizador TEGA tras ser volcado sobre la misma el contenido de la pala. Crédito: NASA / JPL-Caltech / Universidad de Arizona / Texas A&M University.
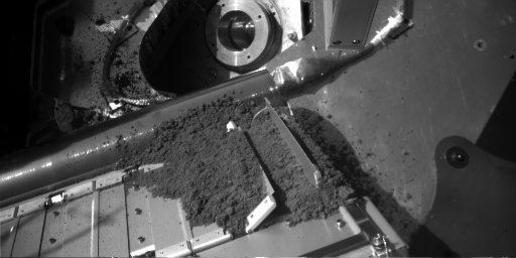
Arriba: TEGA cubierto de tierra. Esta vista captada por la cámara del brazo robótico del Phoenix muestra la misma zona del analizador TEGA desde otra perspectiva. Puede apreciarse cómo el material extraído de la zanja Baby Bear cubre por completo la entrada de uno de los hornos del analizador TEGA. Compárese esta imagen con la primera de este artículo, que muestra la misma ventana antes de recibir la muestra. Crédito: NASA / JPL-Caltech / Universidad de Arizona / Max Planck Institute. Desde entonces, todos los intentos para hacer pasar la muestra través de la rejilla han fracasado. Se ha sometido la muestra a vibraciones periódicas, usando un dispositivo integrado en el analizador TEGA, pero la muestra apenas se ha movido. Y aunque algunos granos de material han alcanzado el horno, no son suficientes para llevar a cabo ningún análisis.
Arriba: Antes y después. Esta composición combina dos imágenes captadas por la cámara del brazo robótico del Phoenix, antes y después de someter al material que cubre la entrada de uno de los hornos del analizador TEGA a siete minutos de vibración. Si comparamos ambas imágenes vemos que el material apenas se mueve; tan sólo se aprecia una grieta de unos tres milímetros que se abre en la parte superior de la ventana del analizador (parte inferior de esta imagen). Crédito: NASA / JPL-Caltech / Universidad de Arizona / Max Planck Institute. El poco éxito obtenido ha llevado a los científicos de la misión a plantearse nuevas alternativas. Una de ellas fue ensayada en Sol 15 (9 de Junio de 2008), y consistió en esparcir la muestra desde lo alto, en lugar de vaciar todo el contenido de la pala. Así esperan evitar que grandes bloques de material colapsen de nuevo la entrada de los analizadores. Si el método funciona, planean usarlo a lo largo de la semana para depositar muestras sobre el Microscopio Óptico incluído en el Microscopy, Electrochemistry and Conductivity Analyzer (MECA) y sobre otro de los hornos de análisis del TEGA.
Arriba: Espolvoreando suelo marciano. Esta composición combina cuatro imágenes captadas por el Surface Stereo Imager (SSI), mostrando la nueva técnica ensayada recientemente para esparcir parte de la muestra sobre una superficie en lugar de vaciar todo el contenido de la pala. Para ello, el brazo robótico situa la pala sobre el objetivo y a continuación la hace vibrar mediante movimientos repetitivos de la cuchilla o raspador que se halla junto a la misma. En esta prueba se esparció la muestra sobre el Microscopy, Electrochemistry and Conductivity Analyzer (MECA). La cubierta del MECA mide unos 20 centímetros, y la pala del brazo robótico en torno a los 8,5 centímetros. Crédito: NASA / JPL-Caltech / Universidad de Arizona / Texas A&M University.
Fuente: Astroseti |
|
|
|