Llegados desde Japón en los 80, los Transformers, robots que pueden adaptar sus formas a diferentes necesidades, se convirtieron en un objeto de culto. Juguetes, cómics, serie de TV, películas, decenas de sitios web de sus fans. Se puede decir que los Transformers existen y están vivos.
Aunque hablamos de ficción, claro.
La idea es más que interesante: máquinas que se adaptan, algo que puede ser muy importante cuando hay que hacerles enfrentar diferentes escenarios, variables e impredecibles. Tan fuerte y utilizable es la idea que la NASA lanzó una convocatoria para la creación de este tipo de robots. La idea se basa en la posibilidad de enviar en las naves espaciales, en lugar de equipos rígidos y que estén especializados en los ambientes que se espera encontrar en destino, una pequeña armada de robots y piezas accesorias que pueden, además de reproducirse, unir las partes de distintas maneras y configurar las formas que sean necesarias en base a las circunstancias.


Un CONRO en acción

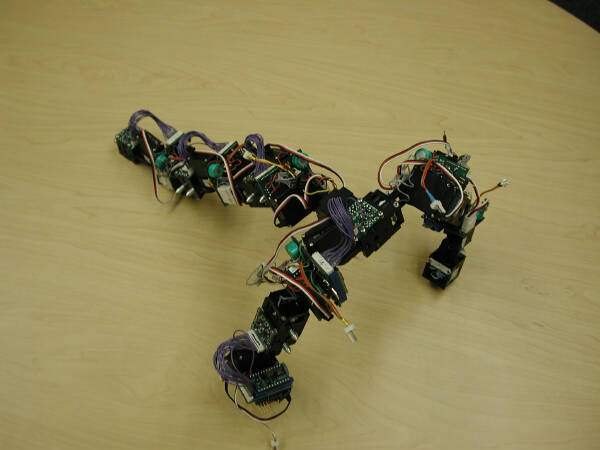
Un CONRO con forma familiar
|
|
Y la convocatoria ha creado respuestas: podemos decir que es muy probable que veamos robots autoconfigurables en nuestro futuro. De hecho ya existen. Guardando la distancia que impone la realidad actual de la tecnología, por supuesto, con respecto a aquellos poderosos Transformers de los dibujos animados.
Pero ¿qué es exactamente, hablando en términos reales, no en una historia de CF, un robot autoconfigurable?
Se pretende que sea una máquina que pueda cambiar de topología por sí misma, sin intervención de la mano del hombre. Parece algo demasiado ambicioso, pero sin embargo existen proyectos en curso, que ya llevan años de avance.
Uno de ellos es el Proyecto CONRO (que quiere decir CONfigurable RObots) del ISI (Information Sciences Institute), de la Universidad de Southern California, en los Estados Unidos. Este grupo se dedica a llevar adelante investigaciones sobre sistemas basados en conocimiento, procesamiento de lenguaje natural y traducción por máquinas, agentes inteligentes y robots, aprendizaje en las máquinas, realidad virtual, robots polimórficos, análisis de datos, integración de la información, interfaces humano-computadora, educación interactiva y gobierno digital. Como se ve, están dedicados a un amplio abanico de técnicas que resultan una más interesante —y estratégica— que la otra.
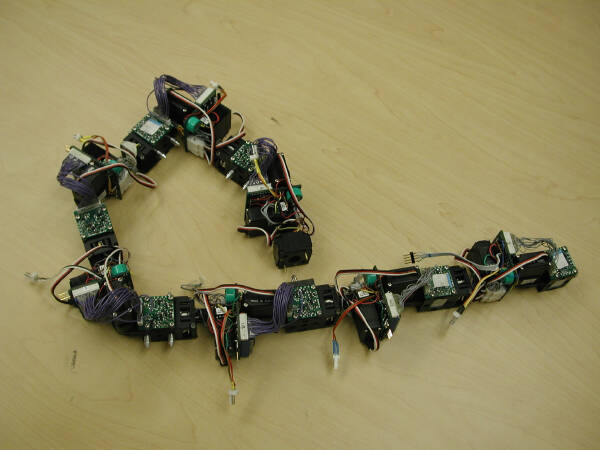
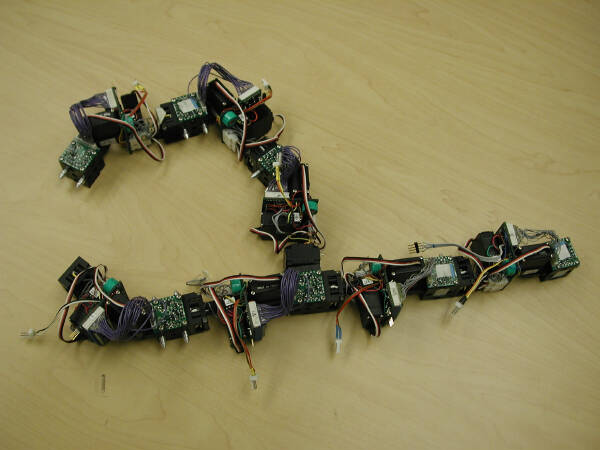
El ISI, que define a sus prototipos como "robots a los que se les puede ordenar que hagan reconocimiento y búsqueda e identificación en entornos de campo urbano, costero y otros", está fabricando unos robots que, en su morfología básica, parecen serpientes, con varios módulos idénticos conectados en forma lineal. "Pero el sistema se puede autoreconfigurar y hacer crecer un par de patas u otros apéndices especializados. Hace esto para responder a estímulos ambientales, como por ejemplo un obstáculo".
Cada pequeño "segmento" o módulo de los prototipos de CONRO es una computadora en sí misma: contiene su propio CPU, algo de memoria, su batería, un micromotor y una amplia variedad de sensores, además de elementos funcionales como visión, conexiones inalámbricas y detectores de apoyo.
Se pueden ver
videos de robots CONRO en los que muestran, por ejemplo, un módulo que ser retuerce sobre la mano de una persona, o dos partes del robot que se unen, para simular luego el arrastrarse ondulante de una lombriz.
Otros modelos se desplazan como insectos de seis patas, valiéndose de dos servomotores en cada apéndice. Pueden verse, en la misma página a la que apunta el enlace de arriba, unos videos del hexápodo en movimiento, y además al modelo "serpiente" cerrándose en forma de anillo y varios más.
Si bien los robots del grupo de fotografías de abajo son manejados por radiocontrol, ya han conseguido "orugas" capaces de unir su cabeza con su cola para formar un anillo, que es capaz de sostenerse en posición vertical y de rodar como una rueda, manteniendo el equilibrio. Y todo ello por "propia iniciativa".
Uno de los objetivos del desarrollo de estas investigaciones sobre "transformers" es conseguir que los robots se armen a partir de miles de unidades microscópicas capaces de agruparse y reconfigurarse de acuerdo a la tarea que se les ordene realizar. Estas futuras "máquinas flexibles" plantean, sin embargo, un colosal desafío técnico: se debe desarrollar un software que deberá estar disperso en miles de pequeñas máquinas y que debe ser capaz de organizarlas como una sola máquina grande.
La ventaja es que no se tratará de una máquina unipotencial (capaz de una sola tarea, como los robots hogareños e industriales que vemos hoy) sino en una máquina pseudobiológica, capaz de afrontar, como los seres vivos, un nuevo desafío a cada instante y de reaccionar en consecuencia.
Wei-Min Shen, uno de los responsables de CONRO, coincide con este concepto: "Los robots deberán reconocer aquellas condiciones que exigen un cambio de forma, deberán ser capaces de determinar cuál es la forma más apropiada a asumir a continuación y estar capacitados para hacerlo rápido y eficientemente bajo confusas condiciones en el mundo real. Éstos son nuestros mayores desafíos. Sin embargo, la recompensa, si conseguimos implementar exitosamente esta tecnología, justifica hacer un gran esfuerzo ".
Wei-Min, especialista en software de robots, ha desarrollado un software que representa el primer paso hacia los objetivos que se han propuesto: es modular y corre en cada una de las unidades. Lo han bautizado "hormonas", por analogía con los mensajeros químicos que, en la biología, se comportan de manera similar. Wei piensa que, si se consigue "orquestar" muchas de estas "hormonas", será posible programar prácticamente cualquier movimiento o cambio de configuración.
La NASA lleva adelante otras líneas de desarrollo de software. Ayana Hayward, del JPL, está desarrollando un tipo de inteligencia artificial capaz de permitir que los robots de exploración planetaria lleguen a "pensar" en forma autónoma y a comportarse "como seres humanos".
Hasta el día de hoy, los robots espaciales (con la única excepción de los de Deep Space 1) sólo son capaces de hacer lo que está explícitamente escrito en su programa, y quedan inertes ante cualquier cambio no esperado.
La idea de Hayward es que estos robots del tipo "perro fiel" requieren una atención humana constante. "Queremos darle instrucciones al robot para que piense sobre los posibles obstáculos que pueda encontrar de la misma manera que lo haría un astronauta en la misma situación," dice. "Nuestro trabajo es ayudar al robot para que piense en términos más lógicos respecto a su giro a la derecha o a la izquierda, no simplemente en cuántos grados de rotación debe ejecutar."
La idea es imitar los procesos que ocurren en el ser humano. Nosotros no tenemos un manual de instrucciones (un programa) rígido adecuado a todas las situaciones posibles, sino que somos flexibles y adaptables. Para ello, la ingeniera se apoya en dos conceptos comunes en el campo que domina: la "lógica difusa" y las "redes neurales".
El primero de ellos no sólo estima los blancos y los negros de las situaciones, sino que estudia toda una gama de grises intermedios (no sólo, por ejemplo, si algo es "alto", sino también qué probabilidad tiene de ser "alto", dependiendo de con qué se lo compara).
La "red neural" es lo que nos permite identificar como "perro" a un ser vivo que tiene cuatro patas, mueve la cola y ladra. En nuestra mente, una "capa" o instancia de procesamiento procesa las entradas (está vivo, tiene cuatro patas, mueve la cola, ladra), y obtiene varios resultados (por ejemplo, "es un animal", "es mamífero", etc), y una segunda (o incluso tercera) instancia sigue procesando resultados —doméstico, conocido, guardián u otras características— hasta llegar a la conclusión final: "es un perro". Nuestra "red" cerebral va aprendiendo qué señales debe dejar pasar y cuáles rechazar como erróneas, y el umbral de cada una de ellas.
Si todo sale bien, el resultado sería un robot capaz de tomar decisiones increíblemente complejas, que le permitieran caminar por sí mismo sobre un planeta desconocido, tomar sus propias decisiones y obtener éxitos muy parecidos a los de un cerebro.

El S5 de Gavin Miller
|
|
Otro de los grupos que está tratando de desarrollar robots de este tipo es el del Dartmough College, en New Hampshire. Una de sus integrantes, la Dra. Daniela Rus, declara: "Creemos que el paradigma de los robots autoconfigurables es el camino que seguirá la robótica en los próximos 20 a 50 años. Los robots de arquitectura fija son demasiado limitados".
Los módulos individuales deberán ser pequeños, para que el robot pueda producir con ellos elementos gráciles como manos y piernas.
Conseguir sumar la tecnología polimórfica con la inteligencia artificial de Hayward pondría en manos de los científicos robots tan versátiles como nunca se han atrevido a soñar.
Las aplicaciones serán infinitas: desde observadores avanzados en el campo de batalla, pasando por versiones microscópicas para operar el cuerpo humano desde adentro y exploradores espaciales autónomos, hasta unidades de rescate que lleven agua, aire y alimentos a víctimas sepultadas.
Con el tiempo, podrán desarrollarse miles de mínimos robots que "decidan" si deben transformarse en un insecto, un tanque, un robot humanoide, desarrollar alas como un avión o sumergirse con la forma de un submarino.
Ese futuro, sin embargo, no está cerca, sino que será dentro de varias décadas.
Más datos:
ISI: Research
The 'Transformers' are coming
Polymorphic Robotics Lab
Dr. Gavin Miller's Snake Robots
Mini Robots to the Rescue
(Traducido, adaptado y ampliado por Marcelo Dos Santos (www.mcds.com.ar) de The USC/ISI CONRO PROJECT y otros sitios de Internet)